|
 |
 |
 | Theory of differential offset continuation |  |
![[pdf]](icons/pdf.png) |
Next: Offset continuation geometry: time
Up: Introducing the offset continuation
Previous: Proof of kinematic equivalence
Equation (1) and the previously published OC
equation (Bolondi et al., 1982) differ only with respect to the
single term
 . However, this
difference is substantial.
. However, this
difference is substantial.
From the offset continuation characteristic equation
(4), we can conclude that the first-order traveltime
derivative with respect to offset decreases with decreasing
offset. The derivative equals zero at the zero offset, as predicted by the
principle of reciprocity (the reflection traveltime has to be an even function of offset). Neglecting
 in (4) leads to the
characteristic equation
in (4) leads to the
characteristic equation
 |
(13) |
which corresponds to the approximate OC equation of
Bolondi et al. (1982). The approximate equation has the form
 |
(14) |
Comparing equations (13) and (4), we
can note that approximation (13) is valid only if
 |
(15) |
To find the geometric constraints implied by inequality
(15), we can express the traveltime derivatives in
geometric terms. As follows from expressions (10) and
(11),
Expression (9) allows transforming
equations (16) and (17) to the form
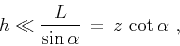
Without loss of generality, we can assume  to be positive.
Consider a plane tangent to a true reflector at the reflection
point
(Figure 2).
The traveltime of a wave, reflected from the plane, has the
known explicit expression
to be positive.
Consider a plane tangent to a true reflector at the reflection
point
(Figure 2).
The traveltime of a wave, reflected from the plane, has the
known explicit expression
 |
(20) |
where  is the length of the normal ray from the midpoint. As
follows from combining (20) and (9),
is the length of the normal ray from the midpoint. As
follows from combining (20) and (9),
 |
(21) |
We can now combine equations (21),
(18), and (19) to transform
inequality (15) to the form
 |
(22) |
where  is the depth of the plane reflector under the midpoint. For
example, for a dip of 45 degrees, equation (14) will be
satisfied only for offsets that are much smaller than the depth of the
reflector.
is the depth of the plane reflector under the midpoint. For
example, for a dip of 45 degrees, equation (14) will be
satisfied only for offsets that are much smaller than the depth of the
reflector.
ocobol
Figure 2. Reflection rays and
tangent to the reflector in a constant velocity medium (a scheme).
|
|
![[png]](icons/viewmag.png) ![[xfig]](icons/xfig.png)
|
|---|
|
|
|
|
| Theory of differential offset continuation | |
|
Next: Offset continuation geometry: time
Up: Introducing the offset continuation
Previous: Proof of kinematic equivalence
2014-03-26