|
|
|
|
Double sparsity dictionary for seismic noise attenuation |
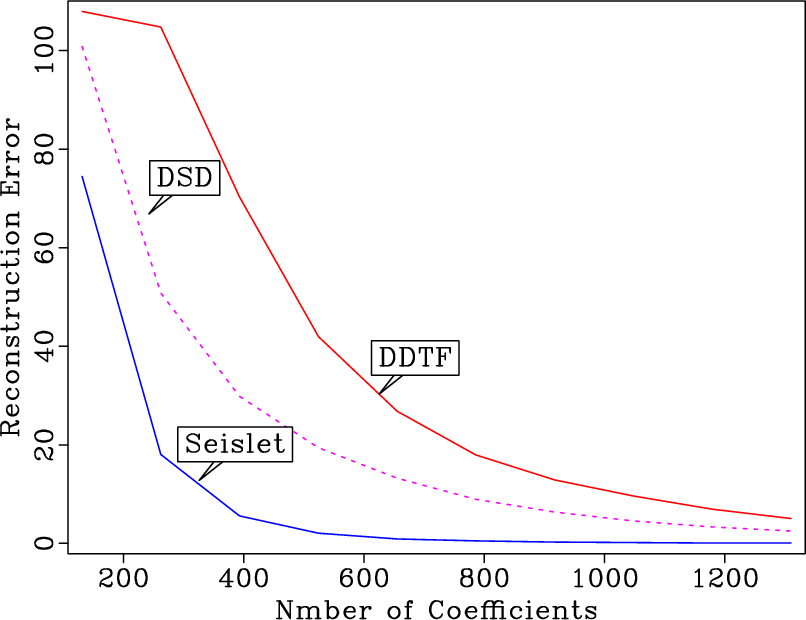
In order to compare the sparsity in compressing seismic data, we plot the reconstruction error curves with respect to the number of selected largest coefficients in Figure 3. The reconstruction error is defined as
![]() , where
, where
![]() denotes the largest
denotes the largest ![]() coefficients in the transform domain. The faster the reconstruction errors decay, the sparser the corresponding transform domain is. Because both DDTF and DSD are redundant transforms, in order to compare the sparsity in terms of compression fairly, we select a different number of largest coefficients to reconstruct the seismic data and plot the corresponding calculated reconstruction errors. The comparison shows that the reconstruction error curve of the seislet transform decays fastest, followed by DSD and DDTF. For other examples in the paper, the comparison of sparsity in terms of compression behaved similarly. Thus, we observe that, in terms of compression performance, the seislet transform behaves best, the proposed DSD behaves the second best, while the traditional DDTF behaves worst. Whether the number of the largest coefficients or the percentage of the largest coefficients should be put on the horizontal label is important. Because the space of transform domain might not have the same dimensions for different transforms, we chose to put the number instead of percentage on the horizontal label. When comparing the sparsity in terms of compression, what we really care about is that the least number of coefficients can represent the most information.
coefficients in the transform domain. The faster the reconstruction errors decay, the sparser the corresponding transform domain is. Because both DDTF and DSD are redundant transforms, in order to compare the sparsity in terms of compression fairly, we select a different number of largest coefficients to reconstruct the seismic data and plot the corresponding calculated reconstruction errors. The comparison shows that the reconstruction error curve of the seislet transform decays fastest, followed by DSD and DDTF. For other examples in the paper, the comparison of sparsity in terms of compression behaved similarly. Thus, we observe that, in terms of compression performance, the seislet transform behaves best, the proposed DSD behaves the second best, while the traditional DDTF behaves worst. Whether the number of the largest coefficients or the percentage of the largest coefficients should be put on the horizontal label is important. Because the space of transform domain might not have the same dimensions for different transforms, we chose to put the number instead of percentage on the horizontal label. When comparing the sparsity in terms of compression, what we really care about is that the least number of coefficients can represent the most information.
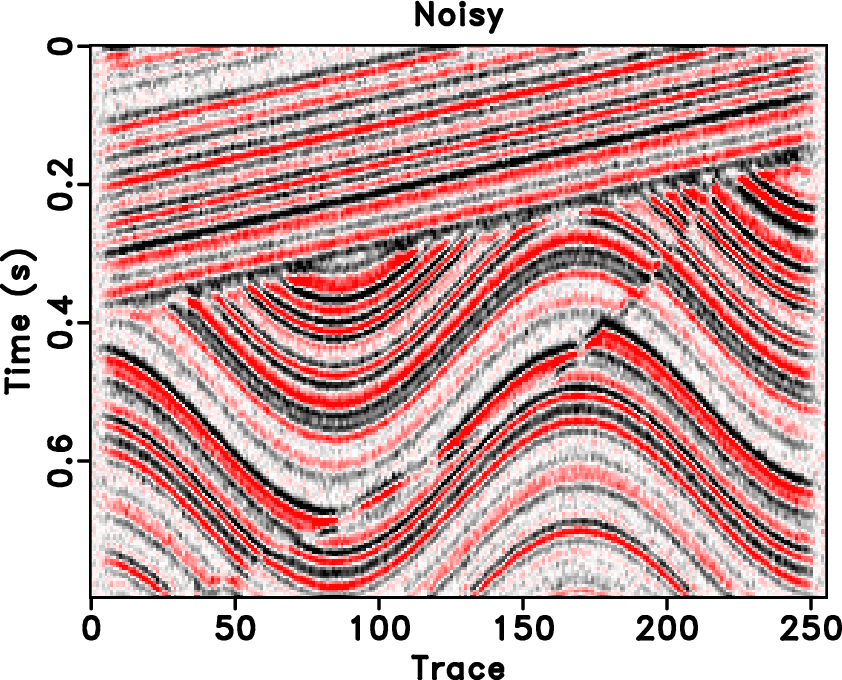
In order to compare the sparsity in terms of denoising performance for three different transforms, we compare the best denoised results using both visual observation and measured SNR. We achieve the best denoising performance by modifying the threshold parameter and by comparing the SNR and general denoising performance, while fixing other parameters that might affect the construction of these transforms. Instead of using a fixed threshold value, we use a more flexible percentile thresholding strategy, which means that we apply the inverse transform by using a specific percentage of the transform domain coefficients sorted by amplitude. The threshold required by the soft- or hard-thresholding in the transform domain is chosen according to the percentage of coefficients we want to preserve. The optimum percentage of coefficients for different approaches might not be the same, therefore we need to set the optimum percentage for all the approaches by trying different percentage to obtain the highest signal-to-noise ratio in order to be fair for all the methods. This strategy was used previously by Chen et al. (2014).
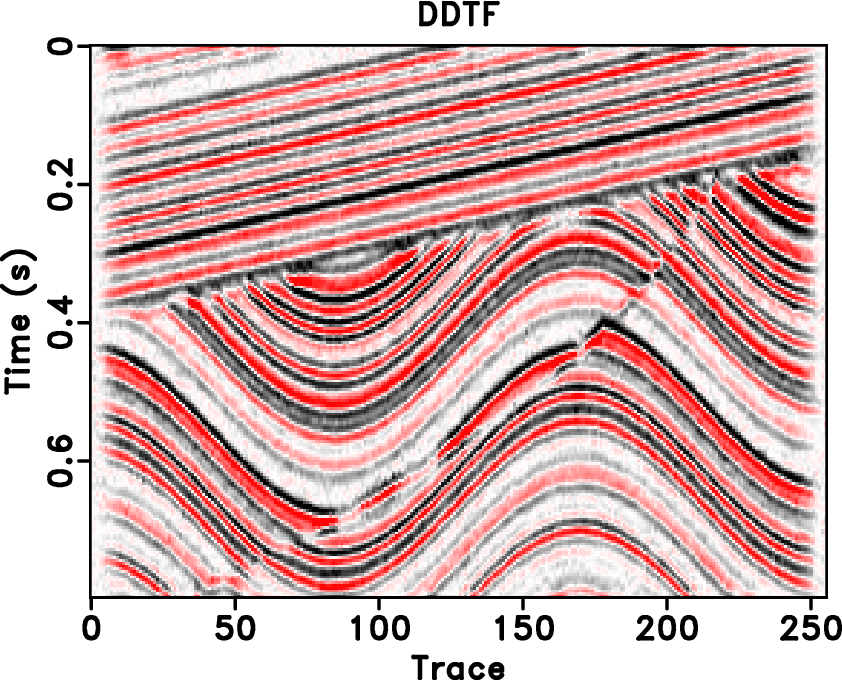
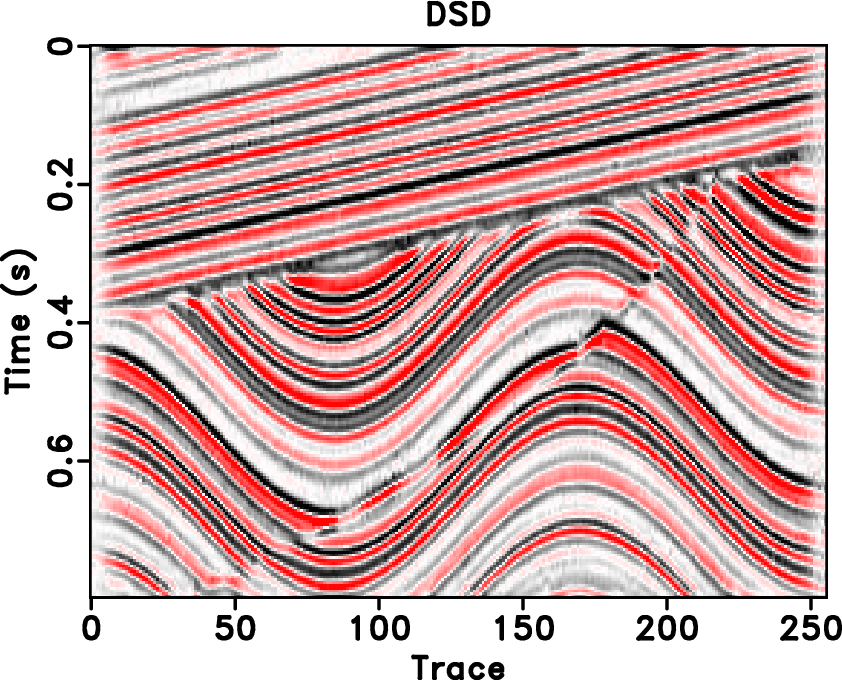
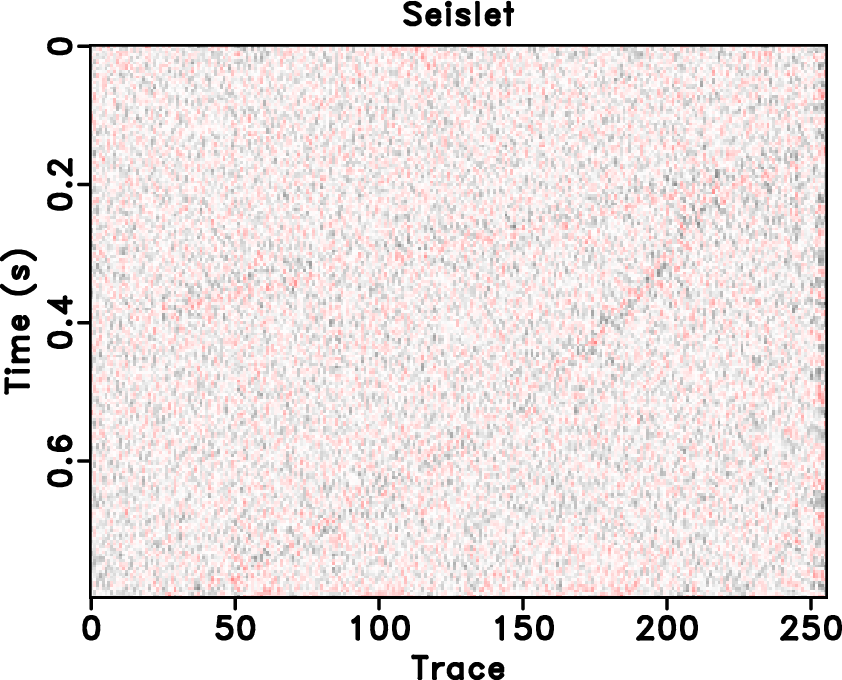
Using different percentage coefficients, we can obtain different denoised results for different thresholding approaches. In this example, we use ![]() patch size for the tight frames and 30 iterations for updating the tight frames and the coefficients. Table 1 shows SNRs using different percentage coefficients for three different thresholding approaches. As evident from Table 1, the seislet thresholding obtains its optimal performance when 5% coefficients are used. The DDTF thresholding obtains its optimal performance when 4% coefficients are used. However, the DSD thresholding only needs 2% coefficients to obtain its optimal performance. The best denoised results are shown in the first row of Figure 4. Their corresponding noise sections are shown in the second row of Figure 4.
patch size for the tight frames and 30 iterations for updating the tight frames and the coefficients. Table 1 shows SNRs using different percentage coefficients for three different thresholding approaches. As evident from Table 1, the seislet thresholding obtains its optimal performance when 5% coefficients are used. The DDTF thresholding obtains its optimal performance when 4% coefficients are used. However, the DSD thresholding only needs 2% coefficients to obtain its optimal performance. The best denoised results are shown in the first row of Figure 4. Their corresponding noise sections are shown in the second row of Figure 4.
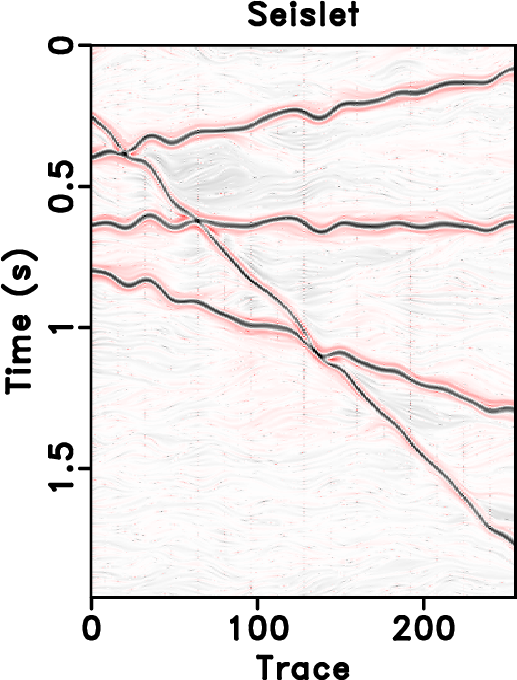
Even for the best results using seislet and DDTF thresholdings, there is still a small amount of residual signal left in the noise sections. The recently proposed local orthogonalization of signal and noise (Chen and Fomel, 2015) may help address this problem. The local orthogonalization can be used in combination with any denoising approach to recover lost coherent signals in the removed noise section. The seislet thresholding algorithm sometimes suffers from this over-smoothing problem. The slight artifacts as shown in Figure 4a are caused by the over-smoothing issue. Figure 4c shows much better performance in terms of removing the artifacts caused in the seislet transform. Thus, another conclusion of this example is that the DSD can also help improve the result of the traditional seislet transform. Figures 4g, 4h, and 4i show the error sections (difference between the denoised data and the true clean data) of the first example using different approaches. We observe that the DSD thresholding can obtain the least denoising error, which further confirms that the DSD thresholding can preserve more useful energy. For simplicity, we only use a 1% increment when scanning the threshold percentage parameters.
The first example demonstrates that the sparsest transform in terms of compression may not be the most efficient for removing random noise. The DSD can achieve a better performance for distinguishing signal and noise. Choosing controlling parameters in order to estimate the best denoised results requires some trial and error in practice. Therefore, from the second synthetic example to the last field data example, we only show the best results for each approach, and calculate the numerical SNRs as a quantitative reference to evaluate the performance.
|
|---|
|
conflict,conflictn
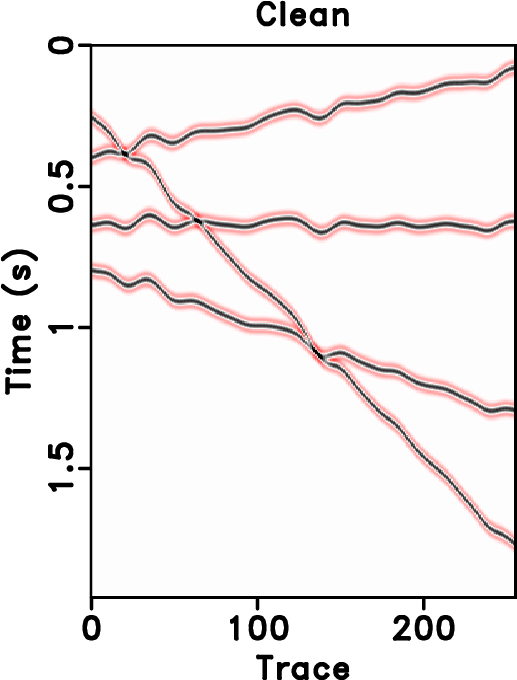
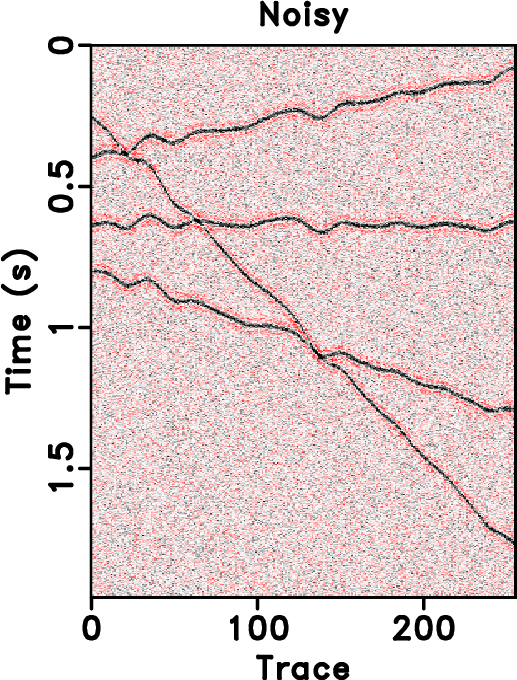
Figure 2. (a) Clean data. (b) Noisy data. |
|
|
|
|---|
|
sparse
Figure 3. Sparsity comparison in terms of compression. |
|
|

|
|---|
|
conflictn-re,conflictn-ddtf,conflictn-ddtf-re,conflictn-dif,conflictn-ddtf-dif0,conflictn-ddtf-dif,conflictn-err,conflictn-ddtf-err,conflictn-ddtf-re-err
Figure 4. First row: denoised sections using different approaches. (a) Seislet thresholding. (b) DDTF thresholding. (c) DSD thresholding. Second row: noise sections using different approaches. (d) Seislet thresholding. (e) DDTF thresholding. (f) DSD thresholding. Third row: error sections using different approaches. (g) Seislet thresholding. (h) DDTF thresholding. (i) DSD thresholding. The best results are selected for each method. |
|
|
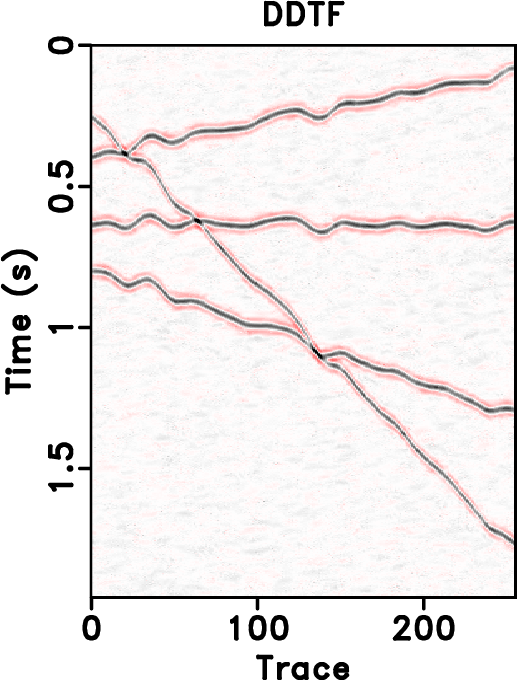
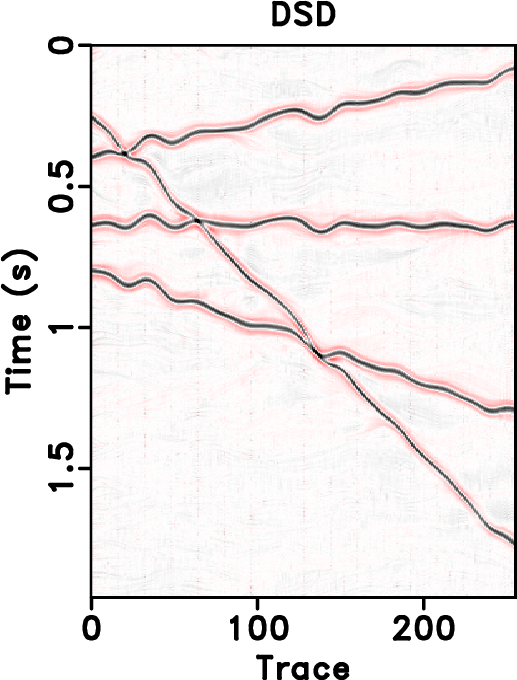
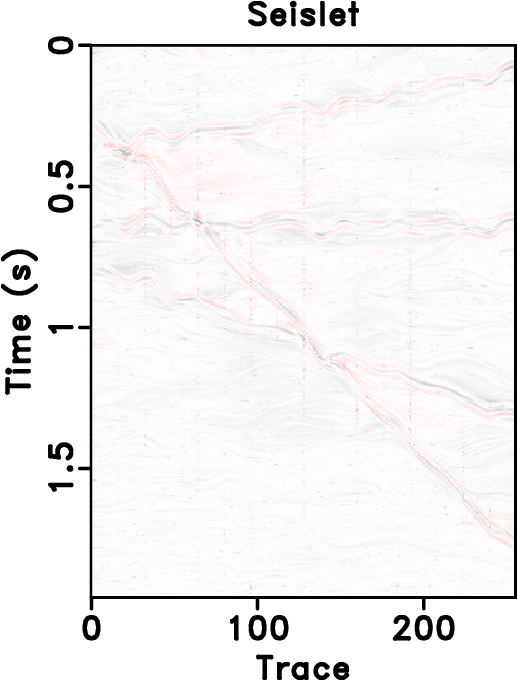
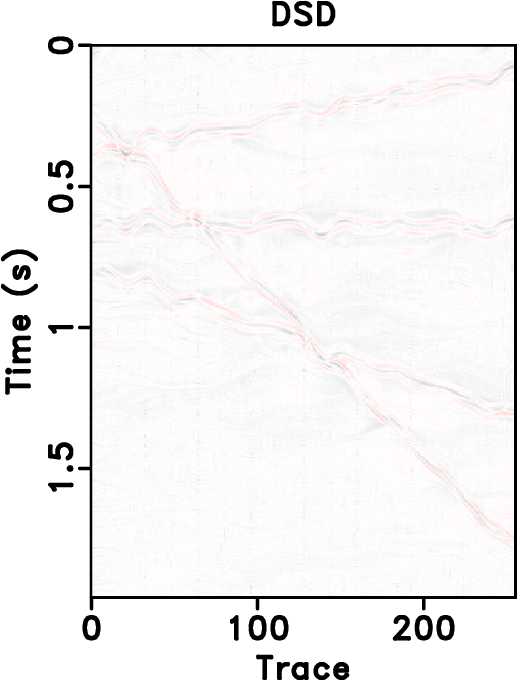
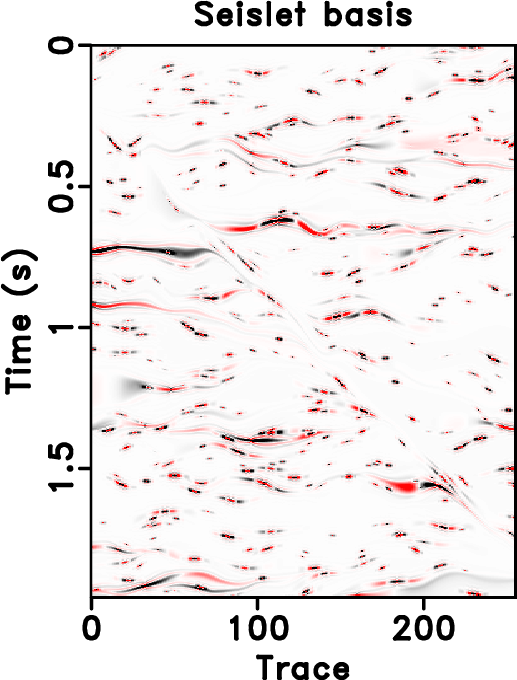
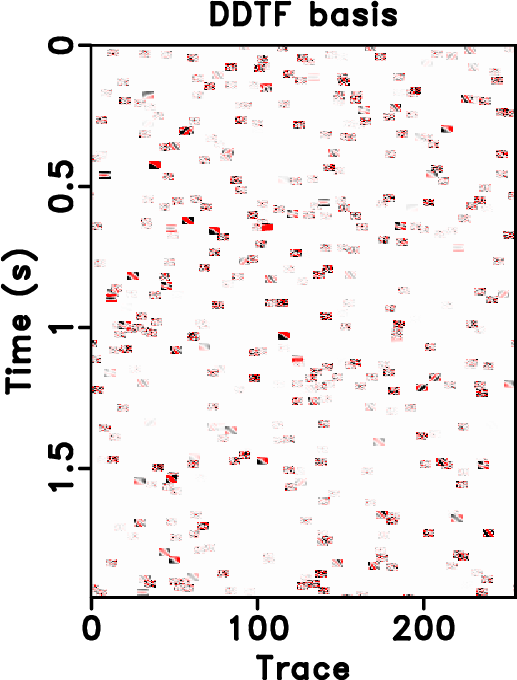
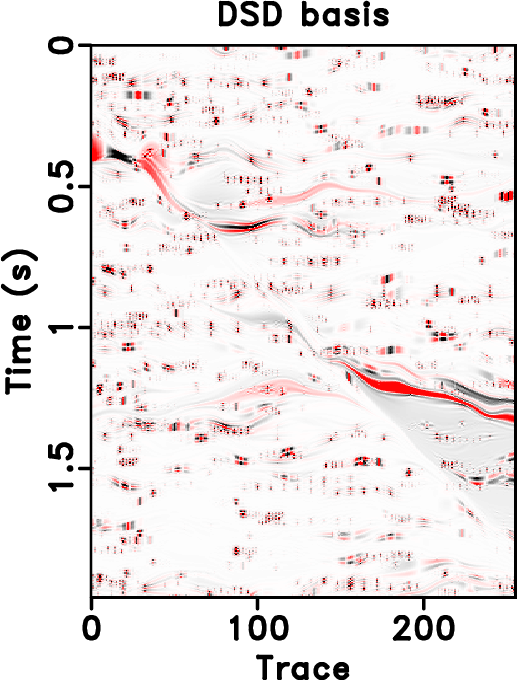
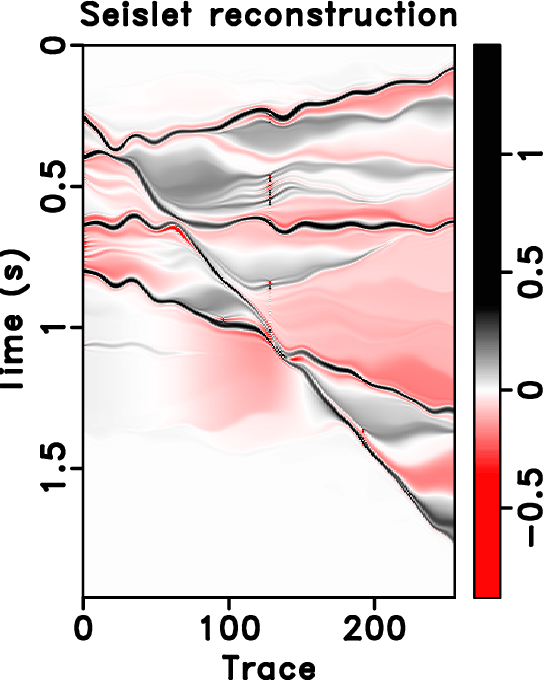
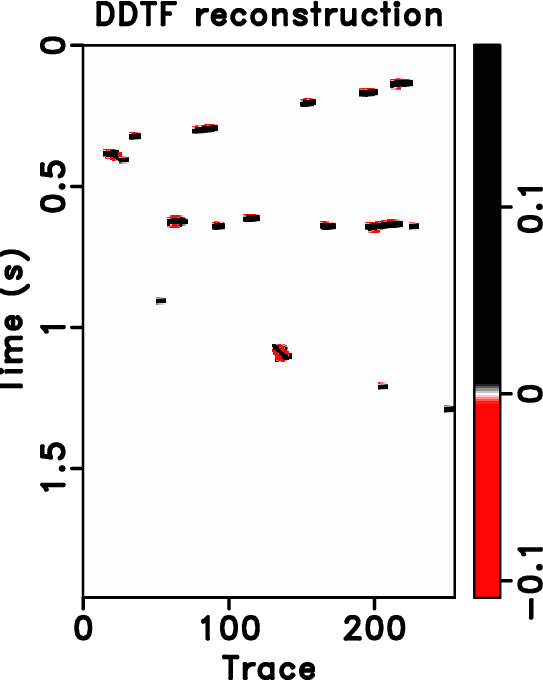
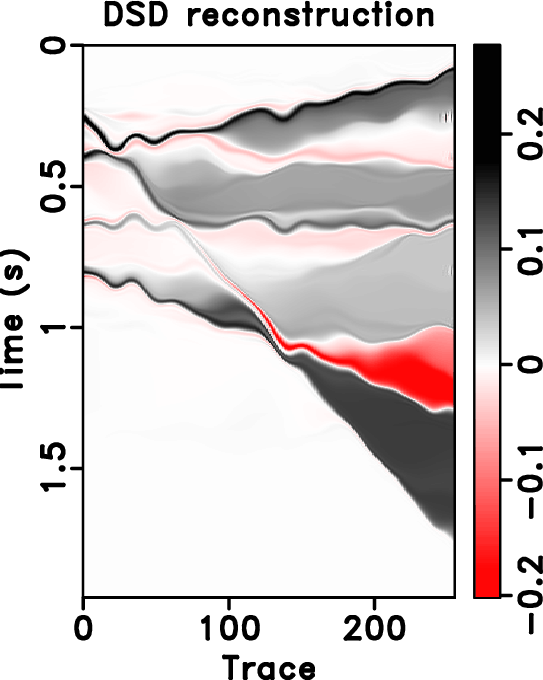
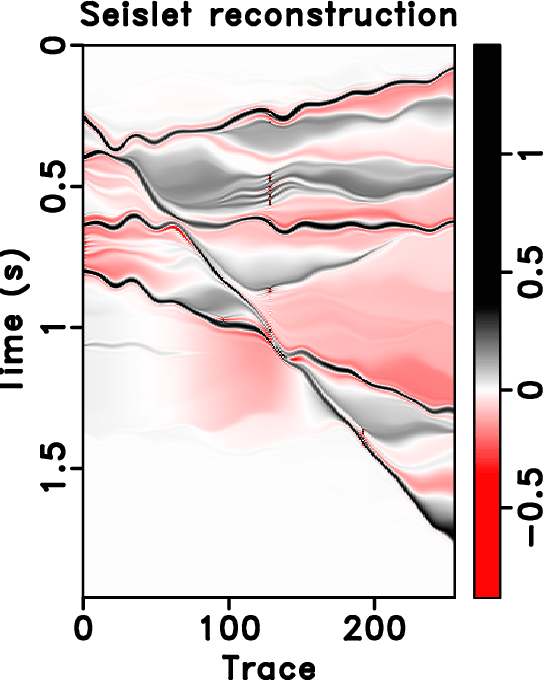
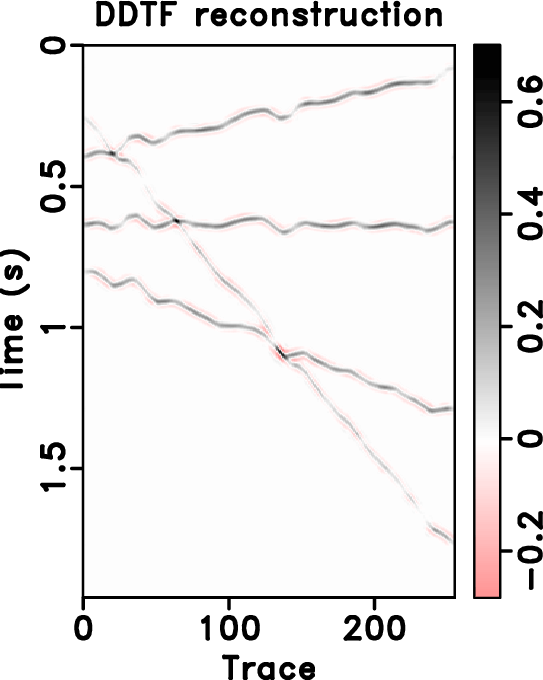
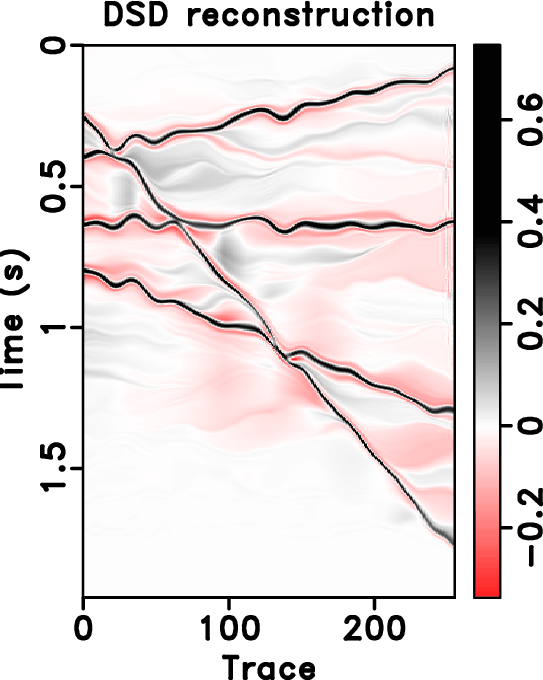
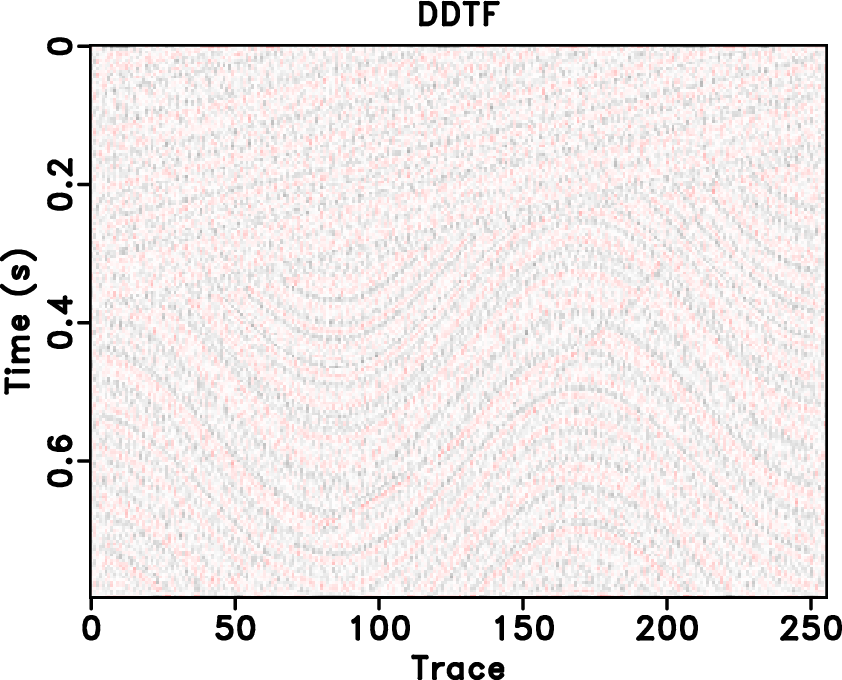
Figure 5 shows a comparison of basis functions of different transforms by randomly selecting a number of significant coefficients in the transform domain, and then transforming the data back to the time-space domain. As can be seen from the comparison, both seislet and DSD have well constructed basis functions following the slope of seismic events. DDTF, however, does not show any structural pattern from the basis functions. DDTF and DSD have better adaptivity than seislet because the seislet basis shows a stronger dependency on the initial slope estimation. In can be observed that the DSD basis (Figure 5c) only shows coherent energy around the linear-events regions, while the seislet basis (Figure 5a) shows coherent energy nearly everywhere because most regions have zero local slope and such zero local slope will cause coherent basis because of a stronger dip dependency of seislet over DSD. The apparent randomness of the basis of DSD lays between that of seislet and DDTF, which indicates a better adaptivity of DSD to the input dataset. When observing Figure 5, we should focus on both the randomness and the coherency of the basis, because randomness and coherency represent the slope dependency and data adaptivity, respectively. The DSD obtains a compromise between the two features. Figure 6 shows a comparison of reconstruction performance by selecting 150 maximum coefficients in different transform domains. It is clear that the same number of coefficients in the seislet transform can recover the most amount of useful reflection energy, which is followed by DSD and DDTF, respectively. Figure 6 is also consistent with the result shown in Figure 3 in that though the DSD can obtain the best performance in separating useful signals and random noise, it is less effective than the seislet transform for compressing the seismic data. Figure 7 shows a comparison of reconstruction performance by selecting 0.1% of the most significant coefficients in different transform domains. Because both DDTF and DSD are redundant, the actual numbers of coefficients in different transform domains are different. For example, in this case, the number of selected coefficients in the seislet domain is 131, but the numbers of selected coefficients in the DDTF and DSD domains are both 6422. It can be seen that in this case the reconstruction using DSD recovers the most information, which is also consistent with Table 1. Figures 6 and 7 also indicate a phenomenon that the largest coefficients in the seislet and DSD domains mainly reconstruct the low-frequency part of the input seismic data, which can be explained by the fact that the low-frequency components are easier for seislet-based transforms to compress.
|
|---|
|
seislets,ddtfs,dsds
Figure 5. Comparison of basis functions by randomly selecting the same number of coefficients in the transform domain. (a) Basis functions of the seislet transform. (b) Basis functions of the DDTF. (c) Basis functions of the DSD. |
|
|
|
|---|
|
seisletsr,ddtfsr,dsdsr
Figure 6. Comparison of reconstruction performance by selecting 150 maximum coefficients in the transform domain. (a) Reconstruction using the seislet transform. (b) Reconstruction using the DDTF. (c) Reconstruction using the DSD. |
|
|
|
|---|
|
seisletsrperc,ddtfsrperc,dsdsrperc
Figure 7. Comparison of reconstruction performance by selecting 0.1% largest coefficients in the transform domain. Note that the number of selected coefficients in different transform domains are different because of the redundant nature of both DDTF and DSD. There are 131 coefficients selected in the seislet domain. There are 6422 coefficients selected in both DDTF and DSD domains. (a) Reconstruction using the seislet transform. (b) Reconstruction using the DDTF. (c) Reconstruction using the DSD. |
|
|
In the second example, we use a Sigmoid synthetic model (Claerbout, 2010). The clean and noisy data are shown in Figures 8a and 8b, respectively. After using soft-thresholding in the seislet domain, DDTF domain, and DSD domain, and selecting the best parameters for each case, we obtain three denoised results, shown in Figure 9. In this example, we also use ![]() patch size for the tight frames and use 30 iterations for updating the tight frames and the DSD coefficients. The three corresponding noise sections are shown in Figure 10. The comparison of SNRs for this example is shown in the first row in Table 2. Thanks to selecting optimal parameters for each method, these denoised results are all acceptable considering both the preservation of useful signals and removal of random noise. However, we observe that the DSD-based thresholding can get better results in that it leaves practically no coherent useful signal in the noise section (Figure 10c) and its calculated SNR is the highest among all the three approaches. In this example, we used 20 % coefficients for seislet transform, 16 % coefficients for DDTF, and 10 % coefficients for DSD. Figures 8, 9, and 10 have the same scaling in order to make the comparison between different methods fair. What is interesting about this example is that Figures 10a and 10c show the fault (as expected), but Figure 10c shows all reflectors nearly equally. This observation is reasonable because DDTF thresholding does not follow the structure of seismic events, thus the denoising process causes equal damage to all events. On the other hand, both seislet thresholding and DSD thresholding include the structure information when constructing the transform, and, therefore, cause smaller damage for events with smoothly changing slope. The damage to the fault regions using traditional denoising approaches is a common problem in seismic data processing. Similar results are also shown by Liu and Fomel (2010). As we can see from this comparison, the denoised result using DSD thresholding can improve the preservation of structural edge information.
patch size for the tight frames and use 30 iterations for updating the tight frames and the DSD coefficients. The three corresponding noise sections are shown in Figure 10. The comparison of SNRs for this example is shown in the first row in Table 2. Thanks to selecting optimal parameters for each method, these denoised results are all acceptable considering both the preservation of useful signals and removal of random noise. However, we observe that the DSD-based thresholding can get better results in that it leaves practically no coherent useful signal in the noise section (Figure 10c) and its calculated SNR is the highest among all the three approaches. In this example, we used 20 % coefficients for seislet transform, 16 % coefficients for DDTF, and 10 % coefficients for DSD. Figures 8, 9, and 10 have the same scaling in order to make the comparison between different methods fair. What is interesting about this example is that Figures 10a and 10c show the fault (as expected), but Figure 10c shows all reflectors nearly equally. This observation is reasonable because DDTF thresholding does not follow the structure of seismic events, thus the denoising process causes equal damage to all events. On the other hand, both seislet thresholding and DSD thresholding include the structure information when constructing the transform, and, therefore, cause smaller damage for events with smoothly changing slope. The damage to the fault regions using traditional denoising approaches is a common problem in seismic data processing. Similar results are also shown by Liu and Fomel (2010). As we can see from this comparison, the denoised result using DSD thresholding can improve the preservation of structural edge information.

|
|---|
|
sig,sign
Figure 8. (a) Clean data. (b) Noisy data. |
|
|

|
|---|
|
sign-re,sign-ddtf,sign-ddtf-re
Figure 9. Denoised sections using different approaches. (a) Seislet thresholding. (b) DDTF thresholding. (c) DSD thresholding. The best results are selected for each method. |
|
|
|
|---|
|
sign-dif,sign-ddtf-dif0,sign-ddtf-dif
Figure 10. Noise sections using different approaches. (a) Seislet thresholding. (b) DDTF thresholding. (c) DSD thresholding. The best results are selected for each method. |
|
|
|
|
|
|
Double sparsity dictionary for seismic noise attenuation |