|
|
|
|
Iterative least-square inversion for amplitude balancing |
Our revised amplitude model is
| (1) |
where ![]() is the earth low-frequency component of the amplitude
function; and
is the earth low-frequency component of the amplitude
function; and ![]() ,
, ![]() ,
, ![]() , and
, and ![]() are the components of
the amplitude caused by the source (
are the components of
the amplitude caused by the source (![]() ), the full offset (
), the full offset (![]() ), the midpoint
(
), the midpoint
(![]() ), and the receiver (
), and the receiver (![]() ) variations, respectively.
) variations, respectively.
We now need to invert for the amplitude correction coefficients in order to remove the stripes in Figure 1. To do so, we use the following quadratic objective function
| (2) |
where we assume that the data ![]() can be modeled as the product of the source,
offset, midpoint, and receiver. Normalization allows us to assume
can be modeled as the product of the source,
offset, midpoint, and receiver. Normalization allows us to assume
![]() .
.
To estimate the coefficients ![]() ,
, ![]() ,
, ![]() , and
, and ![]() we choose
the Gauss-Seidel algorithm which is an iterative least-square inversion
scheme [see Stark (1970)]. We also assume that the coefficients
for which we are solving the objective function
we choose
the Gauss-Seidel algorithm which is an iterative least-square inversion
scheme [see Stark (1970)]. We also assume that the coefficients
for which we are solving the objective function ![]() are independent.
Therefore, we can get an estimation of one type of coefficient (
are independent.
Therefore, we can get an estimation of one type of coefficient (![]() ,
,
![]() ,
, ![]() , or
, or ![]() ) while keeping the value of the other fixed.
) while keeping the value of the other fixed.
Under these assumptions, after minizing the objective function with respect
to the source coefficients, we derive the following expression, giving the
value of the coefficients at iteration ![]() as a function of the other
coefficients at the preceding iteration:
as a function of the other
coefficients at the preceding iteration:
![\begin{displaymath}
a_{s}^{(k)} \: = \: \frac{\sum_{h} \; d \; a_{h}^{(k \, - \...
...\:
a_{y}^{(k \, - \, 1)} \: a_{r}^{(k \, - \, 1)} \right]^2}
\end{displaymath}](img16.png) |
(3) |
We obtain a similar expression for the other three coefficients, where each is expressed as a function of the data and all the other coefficients.
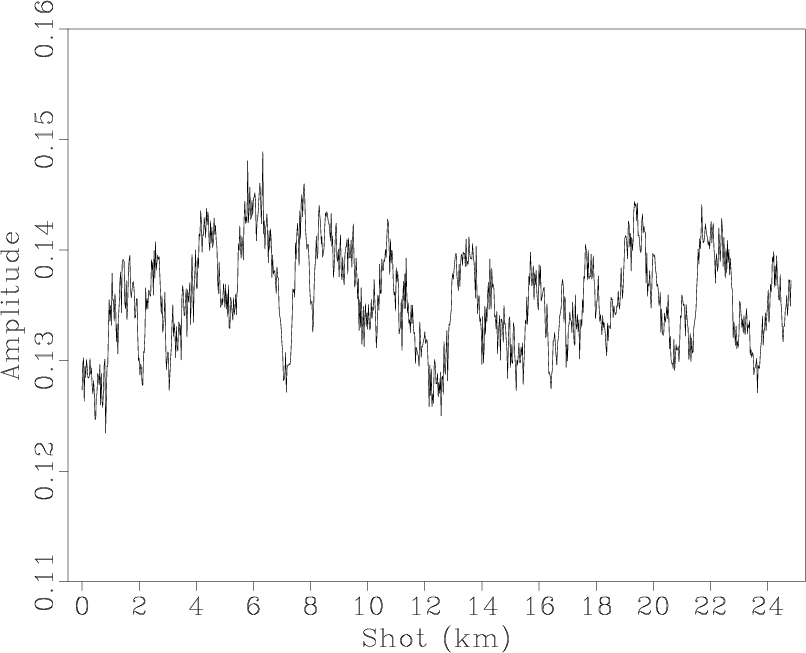
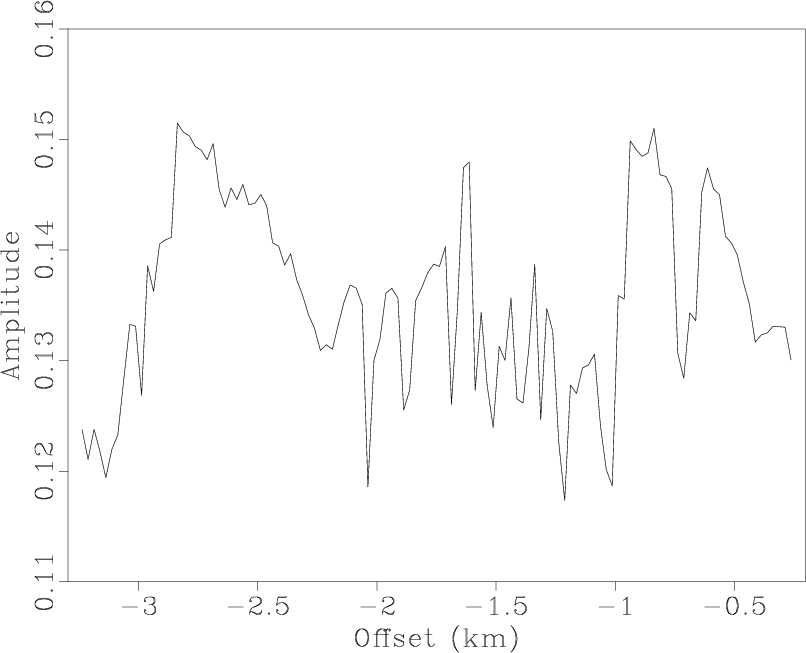
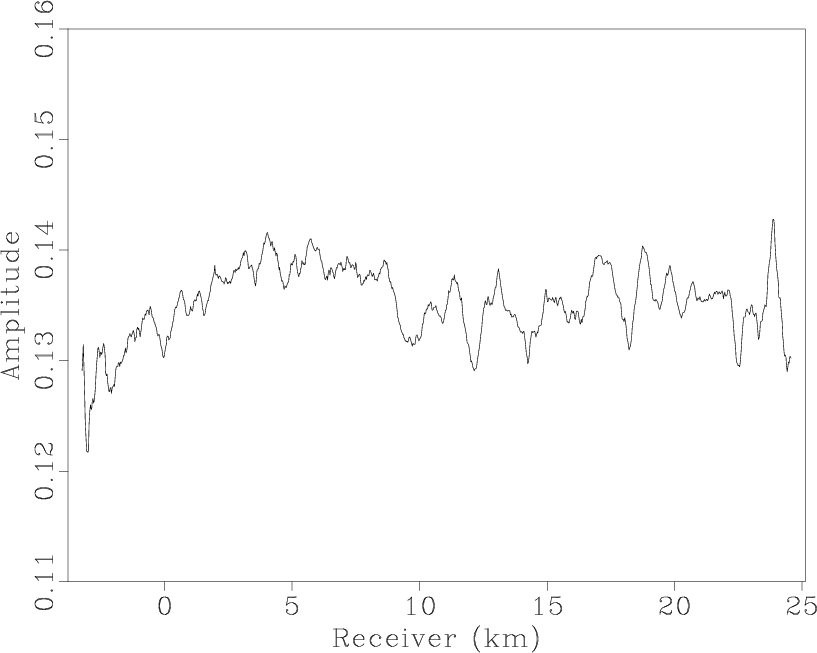
Figures 4, 5, 6, and 7 show the result of the inversion when the algorithm has converged, which required 10 iterations. Comparing the source and offset correction coefficient curves (Figures 4 and 5) with those obtained by Berlioux and Lumley (1994), we can see that the global shape of the curves is the same. The curves in Figures 4 through 7 show identical features: high-frequency variations of the coefficient value around a globally constant value.
|
|---|
|
source
Figure 4. Estimated source coefficients. |
|
|
|
|---|
|
offset
Figure 5. Estimated offset coefficients. |
|
|

|
|---|
|
midpoint
Figure 6. Estimated midpoint coefficients. |
|
|
|
|---|
|
receiver
Figure 7. Estimated receiver coefficients. |
|
|
The next section shows how we use these estimated correction coefficients to cancel the stripes in the original 2-D amplitude map, and thus balance the traces in the survey.
|
|
|
|
Iterative least-square inversion for amplitude balancing |