|
 |
 |
 | Generalized nonhyperbolic moveout approximation |  |
![[pdf]](icons/pdf.png) |
Next: Appendix D: REFLECTION FROM
Up: Fomel & Stovas: Generalized
Previous: Appendix B: LINEAR SLOTH
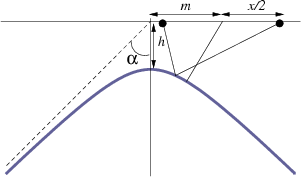
In this appendix, we derive an analytical expression for reflection
traveltime from a hyperbolic reflector in a homogeneous velocity
model (Figure C-1). Similar derivations apply to an elliptic reflector and were
used previously in the theory of dip moveout, offset continuation, and
non-hyperbolic common-reflection surface
(Fomel and Kazinnik, 2009; Stovas and Fomel, 1996; Fomel, 2003).
|
|---|
hyper
Figure 9. Reflection from a hyperbolic reflector in a
homogeneous velocity model (a scheme).
|
|---|
![[png]](icons/viewmag.png) ![[xfig]](icons/xfig.png)
|
|---|
Consider the source point  and the receiver point
and the receiver point  at the
surface
at the
surface  above a 2-D constant-velocity medium and a hyperbolic
reflector defined by the equation
above a 2-D constant-velocity medium and a hyperbolic
reflector defined by the equation
 |
(54) |
The reflection traveltime as a function of the reflection point
location  is
is
 |
(55) |
According to Fermat's principle, the traveltime should be stationary
with respect to the reflection point :
 |
(56) |
Putting two terms in equation C-3 on different sides of
the equation, squaring them, and reducing their difference to a common
denominator, we arrive at the equation
which simplifies to the following quadratic equation with respect to :
 |
(58) |
The discriminant is
 |
(59) |
Only one of the two branches of the solution
has physical meaning. Substituting equation C-7 into
equation C-2, we obtain, after a number of algebraic
simplifications,
 |
(61) |
Making the variable change in equation C-8 from and
to the midpoint and offset coordinates  and
and  according to
according to
 ,
,  , we notice that this equation is exactly
equivalent to equation 1 with the following definition of
parameters:
, we notice that this equation is exactly
equivalent to equation 1 with the following definition of
parameters:
|
|
|
|
| Generalized nonhyperbolic moveout approximation | |
|
Next: Appendix D: REFLECTION FROM
Up: Fomel & Stovas: Generalized
Previous: Appendix B: LINEAR SLOTH
2013-03-02
![$\displaystyle \left[\frac{y}{\cos^2{\alpha}} - x_s\right]^2\,\left[(x_r-y)^2 + h^2 + y^2\,\tan^2{\alpha}\right]$](img139.png)
![$\displaystyle \left[\frac{y}{\cos^2{\alpha}} - x_r\right]^2\,\left[(x_s-y)^2 + h^2 + y^2\,\tan^2{\alpha}\right]$](img141.png)