|
|
|
|
Model fitting by least squares |
Here is an expression that on first sight seems to say nothing:
The easy case is when you can move around the ![]() plane
adding up
plane
adding up ![]() by steps of
by steps of ![]() and
and ![]() and find
upon returning to your starting location that the total time change
and find
upon returning to your starting location that the total time change ![]() is zero.
When
is zero.
When ![]() and
and ![]() are derived from noisy data,
such sums around a path often are not zero.
Old time seismologists would say, ``The survey lines don't tie.''
Mathematically,
it is like an electric field vector that may be derived
from a potential field
unless the loop encloses a changing magnetic field.
are derived from noisy data,
such sums around a path often are not zero.
Old time seismologists would say, ``The survey lines don't tie.''
Mathematically,
it is like an electric field vector that may be derived
from a potential field
unless the loop encloses a changing magnetic field.
We would like a solution for ![]() that gives the best fit of all the data
(the stepouts
that gives the best fit of all the data
(the stepouts ![]() and
and ![]() )
in a volume.
Given a volume of data
)
in a volume.
Given a volume of data ![]() , we seek
the best
, we seek
the best ![]() such that
such that
![]() is flattened. Let us get it.
is flattened. Let us get it.
We write a regression, a residual ![]() that
we minimize to find a best fitting
that
we minimize to find a best fitting
![]() or maybe
or maybe
![]() .
Let
.
Let ![]() be the measurements in the vector in equation (82),
the measurements throughout the
be the measurements in the vector in equation (82),
the measurements throughout the ![]() -volume.
Expressed as a regression, equation (82) becomes:
-volume.
Expressed as a regression, equation (82) becomes:
| (83) |
|
|---|
|
chev
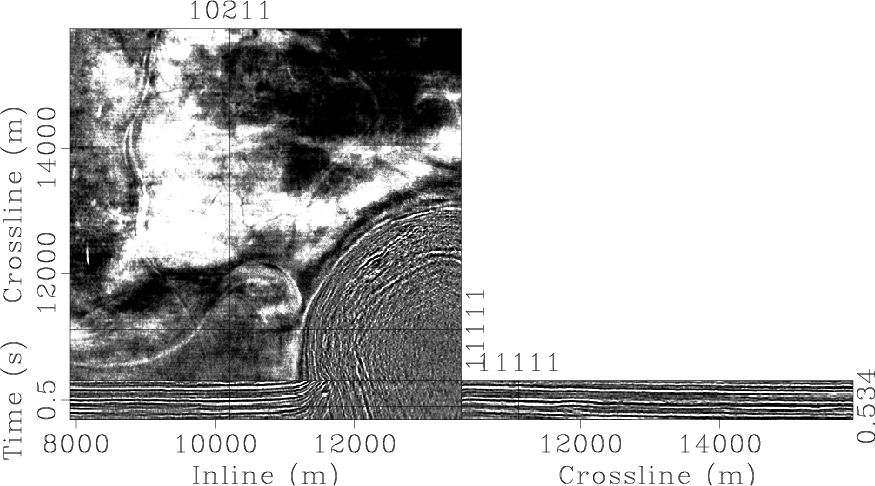
Figure 9. [Jesse Lomask] Chevron data cube from the Gulf of Mexico. Shown are three planes within the cube. A salt dome (lower right corner in the top plane) has pushed upward, dragging bedding planes (seen in the bottom two orthogonal planes) along with it. |
|
|
for (i2=0; i2 < n2-1; i2++) {
for (i1=0; i1 < n1-1; i1++) {
i = i1+i2*n1;
if (adj) {
p[i+1] += r[i];
p[i+n1] += r[i+n12];
p[i] -= (r[i] + r[i+n12]);
} else {
r[i] += (p[i+1] - p[i]);
r[i+n12] += (p[i+n1] - p[i]);
}
}
}
|
do iy=1,ny { # Calculate x-direction dips: px
call puck2d(dat(:,:,iy),coh_x,px,res_x,boxsz,nt,nx)
}
do ix=1,nx { # Calculate y-direction dips: py
call puck2d(dat(:,ix,:),coh_y,py,res_y,boxsz,nt,ny)
}
do it=1,nt { # Integrate dips: tau
call dipinteg(px(it,:,:),py(it,:,:),tau,niter,verb,nx,ny)
}
The code says first to initialize the gradient operator.
Convert the 2-D plane of
|
|
|
|
Model fitting by least squares |
![\begin{displaymath}
\nabla \tau \eq
\left[
\begin{array}{c}
\frac{\partial \tau...
...} \\
\\
\frac{\partial \tau}{\partial y}
\end{array}\right]
\end{displaymath}](img333.png)