|
|
|
|
Plane-wave orthogonal polynomial transform for amplitude-preserving noise attenuation |
Next: Examples Up: Theory Previous: Robust slope estimation
|
|
|
|
Plane-wave orthogonal polynomial transform for amplitude-preserving noise attenuation |
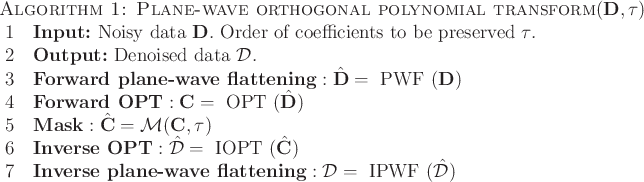
The forward OPT corresponds to inverting
![]() . The inverse OPT corresponds to multiplying the orthogonal polynomial coefficients by
. The inverse OPT corresponds to multiplying the orthogonal polynomial coefficients by
![]() . In algorithm 1, the detailed implementations of the forward plane-wave flattening operator and the inverse plane-wave flattening operator are shown in algorithms 2 and 3, respectively.
. In algorithm 1, the detailed implementations of the forward plane-wave flattening operator and the inverse plane-wave flattening operator are shown in algorithms 2 and 3, respectively.
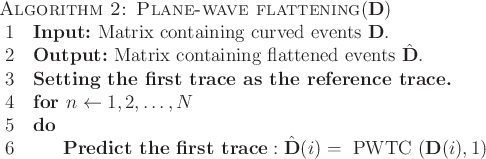
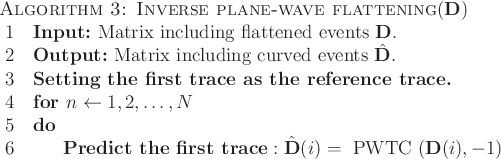
In algorithms 2 and 3, note that ![]() denotes the number of spatial traces.
denotes the number of spatial traces. ![]() and
and ![]() in the operator
PWTC
in the operator
PWTC![]() denote predicting from a trace to the first trace and predicting the first trace to another trace, respectively.
denote predicting from a trace to the first trace and predicting the first trace to another trace, respectively.
![]() and
and
![]() denote the
denote the ![]() th column (or trace) in the matrix
th column (or trace) in the matrix
![]() and
and
![]() .
.
|
|
|
|
Plane-wave orthogonal polynomial transform for amplitude-preserving noise attenuation |