|
|
|
|
Probabilistic moveout analysis by time warping |
Next: 3D generalized nonhyperboloidal moveout Up: Moveout inversion by time Previous: Moveout inversion by time
|
|
|
|
Probabilistic moveout analysis by time warping |
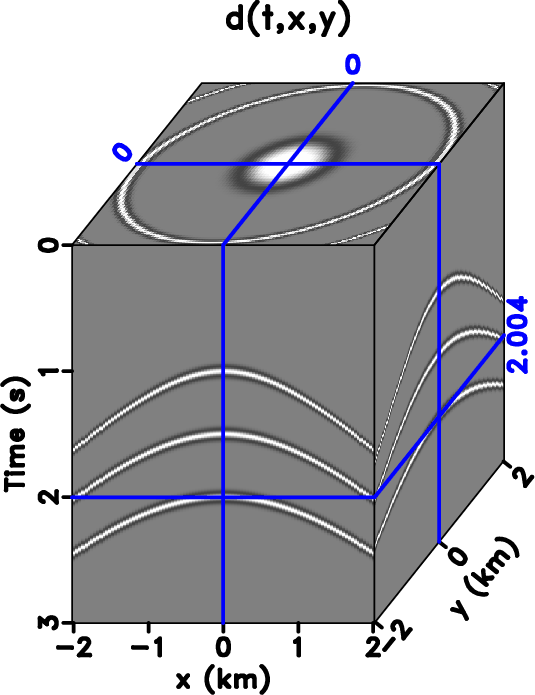
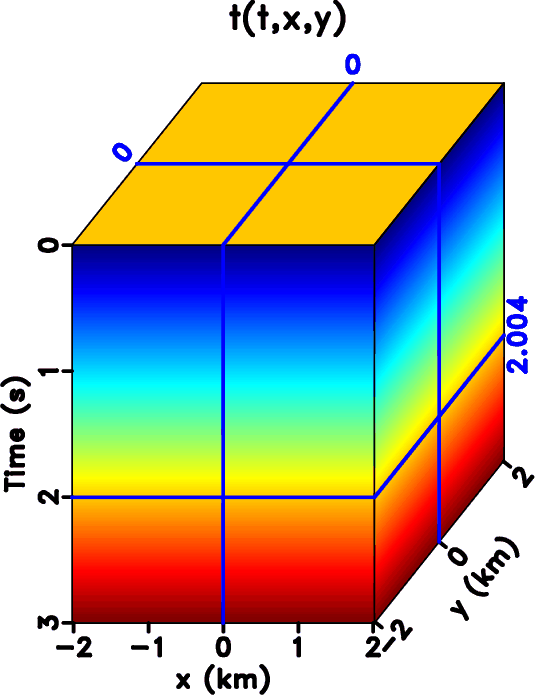
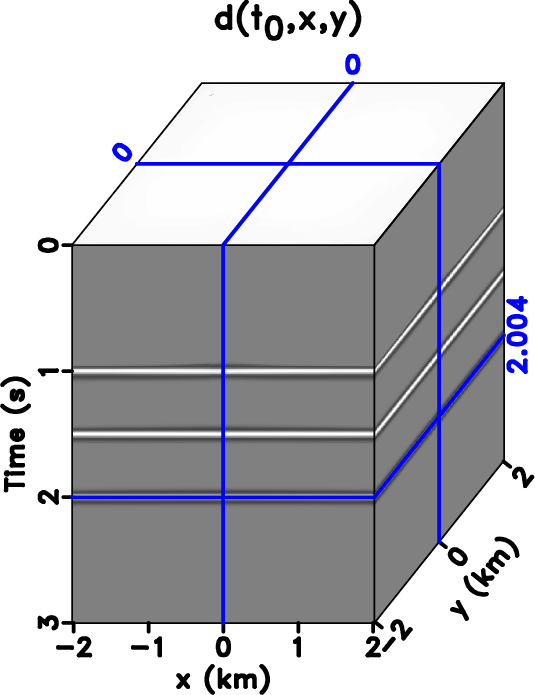
 and a time attribute volume as shown in Figures 1a and 1b. The latter is generated simply by having a similarly-sized volume as the CMP gather with each element storing the corresponding value of traveltime along the axis. After warping, this volume will store the reflection traveltimes from different CMP events.
and a time attribute volume as shown in Figures 1a and 1b. The latter is generated simply by having a similarly-sized volume as the CMP gather with each element storing the corresponding value of traveltime along the axis. After warping, this volume will store the reflection traveltimes from different CMP events.
produces
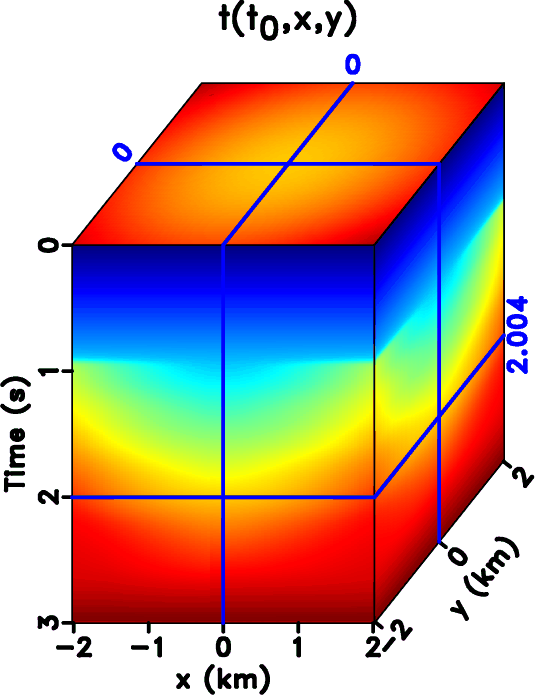
 in Figure 2a. Applying the same filter to the time attribute volume in Figure 1b, we obtain
in Figure 2a. Applying the same filter to the time attribute volume in Figure 1b, we obtain
 in Figure 2b. Here, we restrict our application of warping to only the parts with CMP events between time 1 and 2
in Figure 2b. Here, we restrict our application of warping to only the parts with CMP events between time 1 and 2  .
.
), we can compute the traveltime shift volume by the element-wise subtraction of
 .
.
|
|---|
|
cmpcube,timecube
Figure 1. Original volumes of (a) CMP data and (b) time attribute .
|
|
|
|
|---|
|
flat3cube,warpedtimecube
Figure 2. Warped volumes of (a) flattened CMP and (b) time
. We only apply warping to the time range of 1–2 because CMP events are present only in this  range. range.
|
|
|
The above five steps are carried out in the same way, regardless of the choice of moveout approximation. These steps could also be applied to migrated common-image-point gathers, or many other gather or domain types. In this study, we focus on its application to the problem of moveout inversion, which is dependent upon the choice of moveout approximation  and the inversion method. Different moveout approximations represent different shapes of reflection traveltime surfaces and involve a different number of moveout parameters to be fitted. An appropriate inversion method must also be chosen in accordance with the choice of moveout approximation. Whereas Burnett and Fomel (2009) solved for the three parameters of NMO ellipse moveout model using least-squares inversion, here we use a Monte Carlo inversion to infer the many parameters of the more comprehensive 3D GMA model.
and the inversion method. Different moveout approximations represent different shapes of reflection traveltime surfaces and involve a different number of moveout parameters to be fitted. An appropriate inversion method must also be chosen in accordance with the choice of moveout approximation. Whereas Burnett and Fomel (2009) solved for the three parameters of NMO ellipse moveout model using least-squares inversion, here we use a Monte Carlo inversion to infer the many parameters of the more comprehensive 3D GMA model.
|
|
|
|
Probabilistic moveout analysis by time warping |