|
|
|
|
Nonlinear structure-enhancing filtering using plane-wave prediction |
The lower-upper-middle (LUM) filter is a nonlinear filter that is simple to define and yet effective for noise attenuation in non-stationary signal processing (Hardie and Boncelet, 1993). It has two parameters, one for smoothing and the other for sharpening. A general class of LUM filters includes LUM smoothers and LUM sharpeners as special cases (Appendix B).
By manipulating the parameters ![]() (for smoothing) and
(for smoothing) and ![]() (for
sharpening), the lower-upper-middle (LUM) filter takes
on a variety of characteristics. We found that
(for
sharpening), the lower-upper-middle (LUM) filter takes
on a variety of characteristics. We found that ![]() works
well for our synthetic and field data examples. In the synthetic
example, special smoothing and sharpening parameters,
works
well for our synthetic and field data examples. In the synthetic
example, special smoothing and sharpening parameters, ![]() , were
chosen to balance the ability between noise attenuation and fault
protection. After applying the LUM filter on the synthetic noisy
image, we obtain the image shown in
Figure 3d. Comparing with
Figure 3b, the LUM filter
displays the similar-quality result as Gaussian similarity-mean
filter. However, the LUM filter is somewhat easier to control than the
similarity-mean filter.
, were
chosen to balance the ability between noise attenuation and fault
protection. After applying the LUM filter on the synthetic noisy
image, we obtain the image shown in
Figure 3d. Comparing with
Figure 3b, the LUM filter
displays the similar-quality result as Gaussian similarity-mean
filter. However, the LUM filter is somewhat easier to control than the
similarity-mean filter.
The standard median filter with filter-window length ![]() is compared
to the lower-upper-middle (LUM) filter. After applying
the median filter on the prediction direction of
Figure 1d, the result is shown in
Figure 3c. When comparing with
the mean filter (Figure 3a),
the median filter has a better fault-protection ability but weaker
noise-attenuation result. However, it still makes edges of some faults
ambiguous. The LUM filter uses smoothing and sharpening parameters to
limit the smoothing characteristics of the standard median
filter. Therefore, it strikes a reasonable balance between structure
enhancement and fault
protection. Figure 4c and
4d show the difference between the
noisy image (Figure 1b) and
structure-enhancing results with the standard median filter
(Figure 3c) and the LUM filter
(Figure 3d). While coherent
events can be preserved by either of the two filters, the median
filter has a better result of fault protection than the mean filter
(Figure 4c) and the LUM filter can
further reduce the fault damage of the standard median filter
(Figure 4d).
is compared
to the lower-upper-middle (LUM) filter. After applying
the median filter on the prediction direction of
Figure 1d, the result is shown in
Figure 3c. When comparing with
the mean filter (Figure 3a),
the median filter has a better fault-protection ability but weaker
noise-attenuation result. However, it still makes edges of some faults
ambiguous. The LUM filter uses smoothing and sharpening parameters to
limit the smoothing characteristics of the standard median
filter. Therefore, it strikes a reasonable balance between structure
enhancement and fault
protection. Figure 4c and
4d show the difference between the
noisy image (Figure 1b) and
structure-enhancing results with the standard median filter
(Figure 3c) and the LUM filter
(Figure 3d). While coherent
events can be preserved by either of the two filters, the median
filter has a better result of fault protection than the mean filter
(Figure 4c) and the LUM filter can
further reduce the fault damage of the standard median filter
(Figure 4d).



|
|---|
|
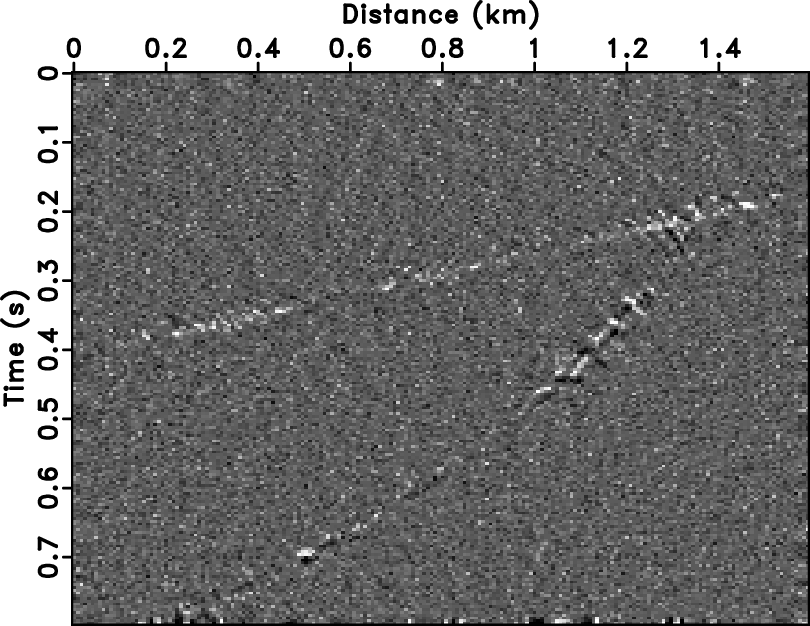
mdif1,gdif1,mdif,ldif1
Figure 4. Difference between Figure 1b and structure-enhancing results (Figure 3). Standard mean filtering (a), similarity-mean filtering (b), standard median filtering (c), and lower-upper-middle (LUM) filtering (d). |
|
|
The key steps of our method are illustrated schematically in Figure 5.

|
|---|
|
strat
Figure 5. Schematic illustration of the proposed workflow. |
|
|
|
|
|
|
Nonlinear structure-enhancing filtering using plane-wave prediction |