|
|
|
|
Time migration velocity analysis by velocity continuation |
To generalize the algorithm of the previous section to the prestack case, it is
first necessary to include the residual NMO term (Fomel, 2003). Residual normal
moveout can be formulated with the help of the differential equation:
Implementing the residual moveout correction in the Fourier domain allows one to package it conveniently with the phase-shift operator without the need to transform the continuation result back to the time domain. The offset dimension in equation (14) is replaced by the velocity dimension similarly to the velocity transform of the conventional stacking velocity analysis (Yilmaz, 2001).
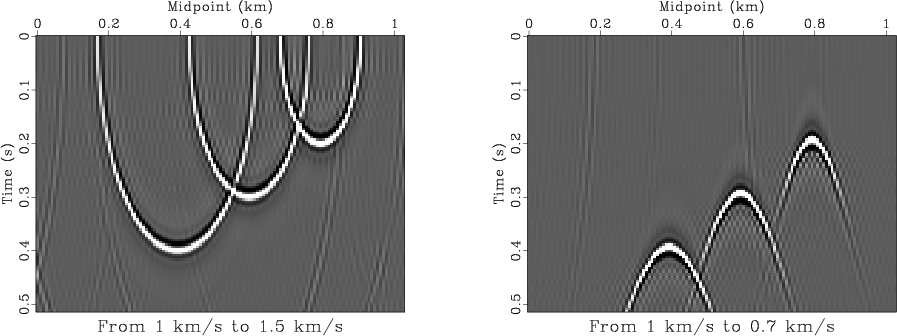
Figure 9 shows impulse responses of prestack velocity continuation. The input for producing this figure was a time-migrated constant-offset section, corresponding to an offset of 1 km and a constant migration velocity of 1 km/s. In full accordance with the theory (Fomel, 2003), three spikes in the input section transformed into shifted ellipsoids after continuation to a higher velocity and into shifted hyperbolas after continuation to a smaller velocity. Padding of the time axis helps to avoid the wrap-around artifacts of the Fourier method. Alternatively, one could use the artifact-free but more expensive Chebyshev spectral method (Fomel, 1998).
|
|---|
|
velimp
Figure 9. Impulse responses of prestack velocity continuation. Left plot: continuation from 1 km/s to 1.5 km/s. Right plot: continuation from 1 km/s to 0.7 km/s. Both plots correspond to the offset of 1 km. |
|
|
Velocity continuation creates a time-midpoint-velocity cube (four-dimensional for 3-D data), which is convenient for picking imaging velocities in the same way as the result of common-midpoint or common-reflection-point velocity analysis. The important difference is that velocity continuation provides an optimal focusing of the reflection energy by properly taking into account both vertical and lateral movements of reflector images with changing migration velocity. An experimental evidence for this conclusion is provided in the examples section of this paper.
The next subsection discusses the velocity picking step in more detail.
|
|
|
|
Time migration velocity analysis by velocity continuation |