|
|
|
|
A second-order fast marching eikonal solver |
The leading term in the computational cost of the fast marching
algorithm comes from the first step:
choosing the point on the wavefront with the smallest traveltime.
Consequently, the cost should not depend strongly on the order of the
finite-difference stencil, but rather the sort algorithm used.
Heap sorting has a cost of ![]() , and so in principle, with this
algorithm, the fast marching method has a cost of
, and so in principle, with this
algorithm, the fast marching method has a cost of ![]() .
.
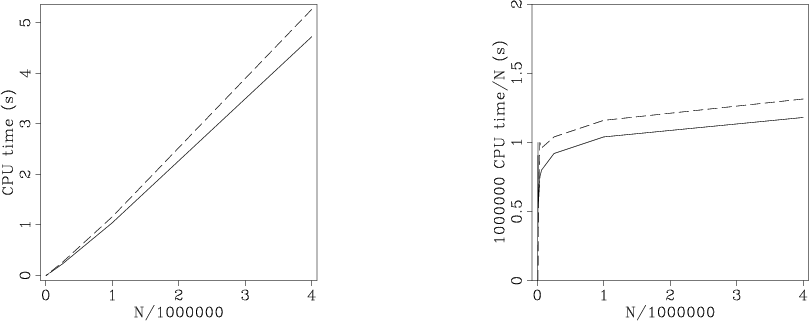
The left panel of Figure 4 shows a plot of CPU time
against ![]() for the same models as Figure 2.
The time shown is elapsed (wall clock) time on a 300 MHz Pentium II.
For the largest model computed here, the second-order code takes 11%
longer to run than the first-order code, and this percentage decreases
as
for the same models as Figure 2.
The time shown is elapsed (wall clock) time on a 300 MHz Pentium II.
For the largest model computed here, the second-order code takes 11%
longer to run than the first-order code, and this percentage decreases
as ![]() increases.
increases.
Because ![]() grows slowly compared to
grows slowly compared to ![]() , the plot of CPU time
against
, the plot of CPU time
against ![]() is dominated by the linear term. The right panel in
Figure 4 addresses this issue by showing CPU time
divided by
is dominated by the linear term. The right panel in
Figure 4 addresses this issue by showing CPU time
divided by ![]() versus
versus ![]() . On this graph, the
. On this graph, the ![]() behaviour is
clearly visible.
behaviour is
clearly visible.
|
|---|
|
times
Figure 4. Elapsed CPU time vs. the number of grid points, |
|
|
|
|
|
|
A second-order fast marching eikonal solver |