|
|
|
|
Seismic dip estimation based on the two-dimensional Hilbert transform and its application in random noise attenuation |
Using equation 3, we compute the local dip by using the specific values of the space- and time-directional derivatives. Hence, we first discuss the derivative operator.
The ideal differentiator frequency response is
The redefined noniterative local dip of the seismic data is
|
|---|
|
noise,nrt,nrx,rizdip
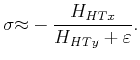
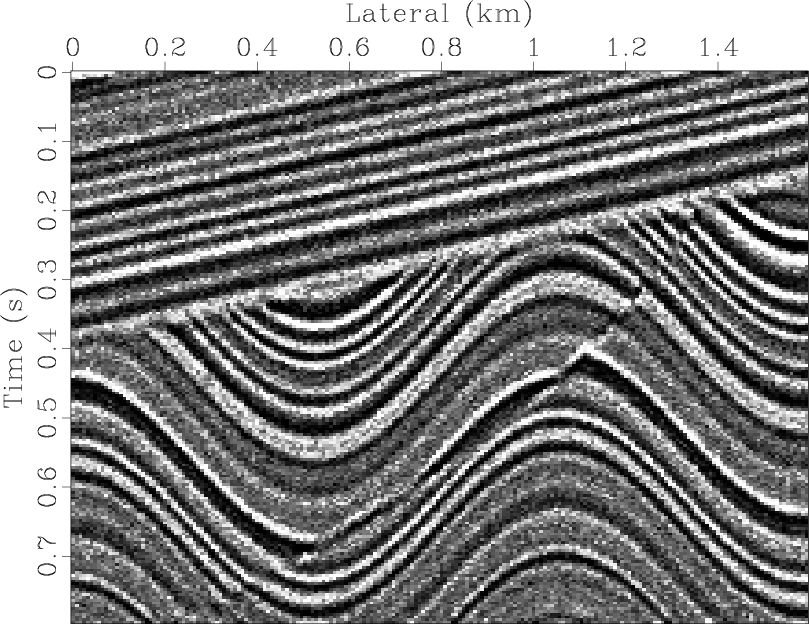
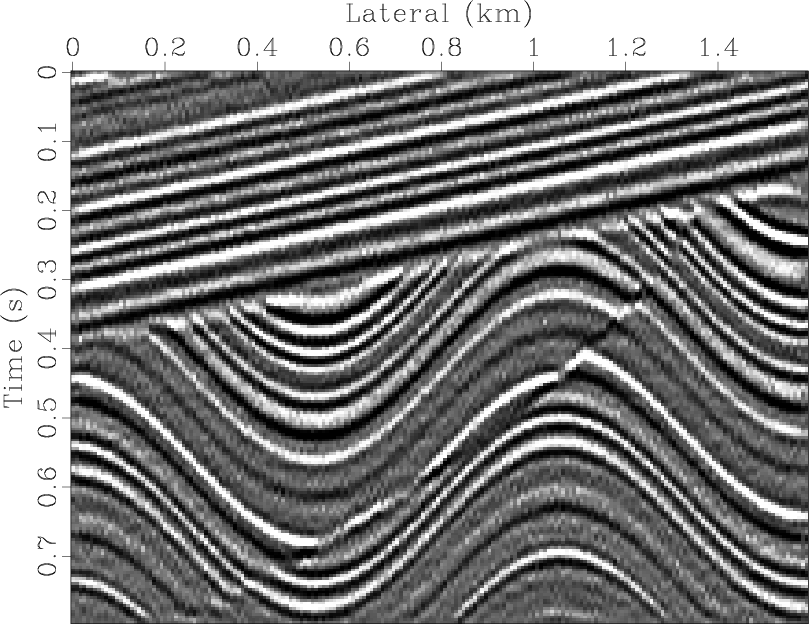
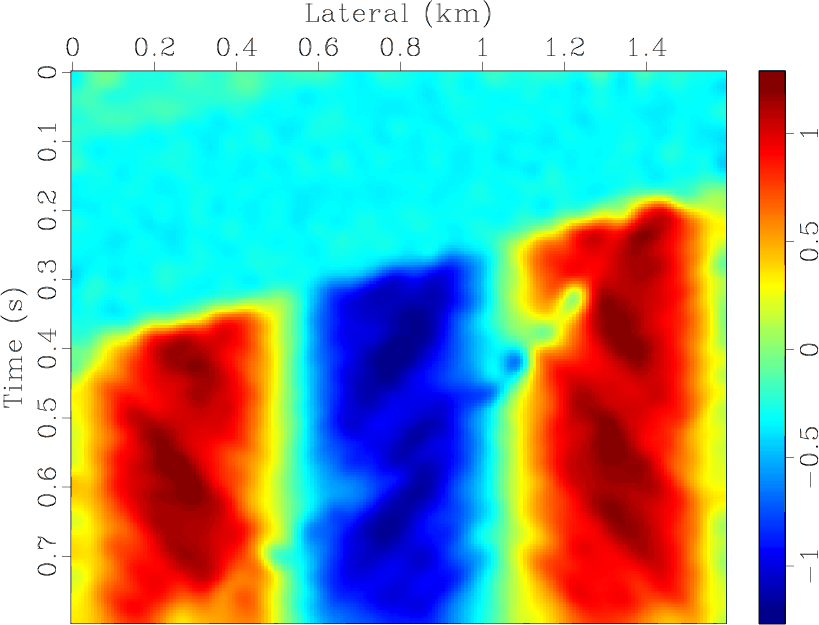
Figure 1. Local seismic dip based on the 2D Hilbert transform. Synthetic seismic data (a), time component of the 2D Hilbert transform (b), space component of the 2D Hilbert transform (c), and local seismic dip (d). |
|
|
To show the validity of the proposed dip calculation method, we
construct a synthetic seismic model and add white Gaussian random
noise, as shown in Figure 1a. The
components of the 2D Hilbert transform in the ![]() and
and ![]() direction
are shown in Figures 1b and
1c, respectively. We obtain the dip of
the seismic data by using the ratio of the two components and
calculate the smoothing constraints, as shown in
Figure 1d. We see that the calculation
results can accurately reflect the dip value of the original data at
different locations, such as the tilted layers at the top the
underlying strata with the sinusoidal fluctuations, and the fault
location. Using the 2D Hilbert transform and shaping regularization,
we obtain the smooth local dip attribute.
direction
are shown in Figures 1b and
1c, respectively. We obtain the dip of
the seismic data by using the ratio of the two components and
calculate the smoothing constraints, as shown in
Figure 1d. We see that the calculation
results can accurately reflect the dip value of the original data at
different locations, such as the tilted layers at the top the
underlying strata with the sinusoidal fluctuations, and the fault
location. Using the 2D Hilbert transform and shaping regularization,
we obtain the smooth local dip attribute.
Another effective calculation method of the time-varying and
space-variant seismic local dip is based on the plan-wave destruction
(PWD) filter proposed by Fomel (2002). The PWD filter realizes the
plane-wave propagation across different traces, while the total energy
of the propagating wave stays invariant, by using an all-pass digital
filter in the time domain and a Taylor expansion of the all-pass
filter frequency. We obtain the relation of the PWD and
space-time-varying local seismic dip by using the Gauss-Newton
algorithm to solve the nonlinear problem of local seismic dip. This
method can be essentially understood as solving an implicit
finite-difference scheme for the local planewave equation. The
disadvantage of the PWD-based calculation method is its slow
computation speed, which is especially worse at higher order
conditions. The computational cost of the proposed method is
proportional to
![]() , where
, where
![]() is the
data size, whereas the computational efficiency of the PWD-based dip
estimation method is proportional to
is the
data size, whereas the computational efficiency of the PWD-based dip
estimation method is proportional to
![]() , where
, where ![]() is the number of iterations. Hence, to
achieve similar accuracy, the dip estimation method based on the 2D
Hilbert transform requires a smaller number of iterations than the
PWD-based method.
is the number of iterations. Hence, to
achieve similar accuracy, the dip estimation method based on the 2D
Hilbert transform requires a smaller number of iterations than the
PWD-based method.
The dip of seismic events controls the trend of the constructed seismic model; thus, next, we need to apply filtering along the trend. The selected filtering method must simultaneously suppress the seismic noise and protect structural information.
|
|
|
|
Seismic dip estimation based on the two-dimensional Hilbert transform and its application in random noise attenuation |

![$\displaystyle {\sigma} =-(\frac{\partial{P}}{\partial{x}}{\slash} \frac{\partia...
...ac{FFT^{-1} [H_{HT}(x)]}{FFT^{-1}[H_{HT}(y)]}{\approx}-\frac{H_{HTx}}{H_{HTy}},$](img23.png)