Prediction-error filtering is called
``blind deconvolution''.
In the exploration industry it is simply called ``deconvolution''.
This word goes back to very basic models and concepts.
In this model one envisions
a random white-spectrum excitation function
existing in nature, and this excitation function
is somehow filtered by unknown natural processes,
with a filter operator
producing an output
in nature
that becomes the input
to our computer programs.
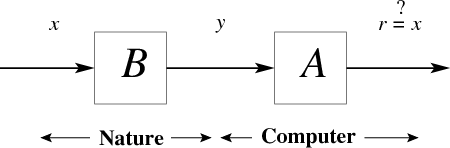
This is sketched in Figure 1.
systems
Figure 1.
Flow of information from nature,
to observation, into computer.
Then we design a prediction-error filter
on
,
which yields a white-spectrum residual
.
Because
and
theoretically have the same spectrum,
the tantalizing prospect is that maybe
equals
,
meaning that the PEF
has deconvolved
the unknown convolution
.