|
|
|
|
Multidimensional autoregression |
An open question is how many conjugate-direction iterations are needed in missing-data programs. When estimating filters, I set the iteration count niter at the number of free filter parameters. Theoretically, this gives me the exact solution but sometimes I run double the number of iterations to be sure. The missing-data estimation, however is a completely different story. The number of free parameters in the missing-data estimation, could be very large. This often implies impractically long compute times for the exact solution. In practice I experiment carefully with niter and hope for the best. I find that where gaps are small, they fill in quickly. Where the gaps are large, they don't, and more iterations are required. Where the gaps are large is where we must experiment with preconditioning.
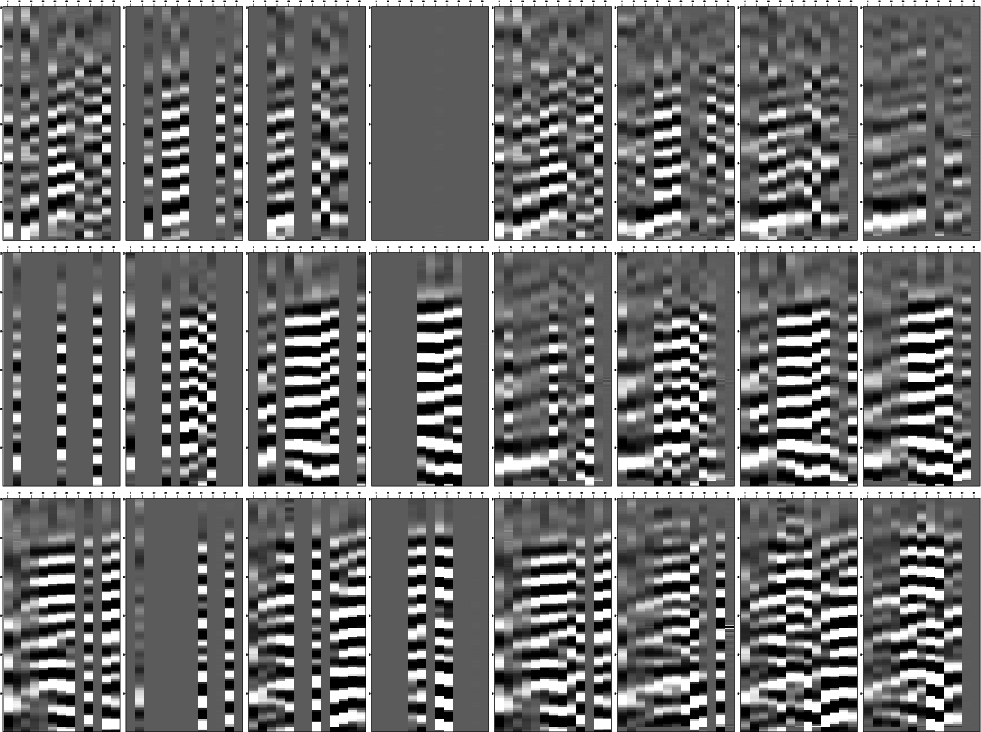
Figure 21 shows an example of
replacing missing data by values predicted from a 3-D PEF.
The data was recorded at Stanford University
with a
![]() array of independent recorders.
The figure shows 12 of the 13 lines each of length 13.
Our main goal was to measure the ambient night-time noise.
By morning about half the recorders had dead batteries
but the other half recorded a wave from a quarry blast.
The raw data was distracting to look at
because of the many missing traces
so I interpolated it with a small 3-D filter.
That filter was a PEF.
array of independent recorders.
The figure shows 12 of the 13 lines each of length 13.
Our main goal was to measure the ambient night-time noise.
By morning about half the recorders had dead batteries
but the other half recorded a wave from a quarry blast.
The raw data was distracting to look at
because of the many missing traces
so I interpolated it with a small 3-D filter.
That filter was a PEF.
|
|---|
|
passfill
Figure 21. The left 12 panels are the inputs. The right 12 panels are outputs. |
|
|
|
|
|
|
Multidimensional autoregression |